
にMY新宿第2ビル(ヨドバシカメラ新宿西口本店)で「小城崇史 ✕ 開発者が語る OM-D E-M1 Mark II の魅力」(Internet Archive)に参加しました。講師は小城崇史先生。


MY新宿第2ビルの会場で行われました。時間は短めですので、ポイントだけに集中しつつ密度濃くトークがされました。
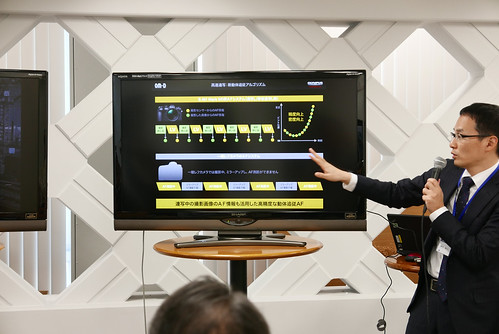
小城先生はPhoto Fest 2016でも披露した「通過する新幹線のワイパーにピントを合わせて連写する」を解説しました。
このあと、オリンパスの開発の方が、3つの特徴を解説:
- 新動体追従アルゴリズム
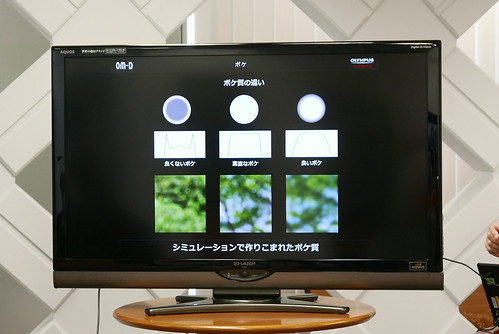
- ボケ質
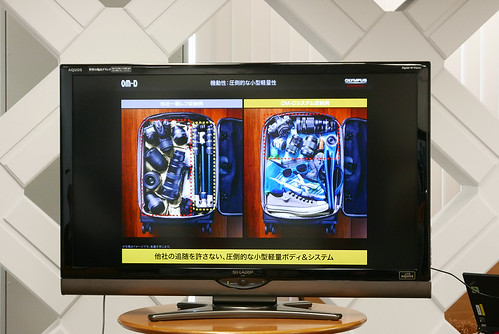
- 小型軽量性
「新動体追従アルゴリズム」はアルゴリズムの解説ではないと思いますが(そこはあまり明かしたがらないでしょうし、参加対象の層をもっと絞らないと伝わらないでしょう)、動作について興味深い解説がありました。
ミラーがないため常時センサーに画像が捉えられているので、撮影した瞬間の像も含め途切れなく測距計算を行っているというものです。これは測距の密度が上がるというか、測距の切れ目がなくなるので(撮影の前後に断絶が多少あるでしょうが)そこでの不連続によるサーボのショック(過渡応答)が生じないメリットがあるでしょう。
サーボの差分信号(この場合測距データ)が途切れることが起こる場合、サーボショックを減らすにはサーボの応答特性を落とす(「惰性」を大きくする)ことだと思いますがそうすると変化の大きい動体への追従性能が悪くなります。するとこれを補うために、測距出来てない時間帯はサーボゲインを落としたりサーボ帯域を狭くしたりし、測距が始まったらサーボ特性を元に戻すという制御をする、など色々と仕組みを入れていくことになるでしょう。
E-M1 IIの方式でも撮影前後は撮影画像取り込み期間測距出来ないので(その間は撮影画像1枚による測距1回か?)測距頻度が少し落ちる状態になるでしょうが、ミラーによるブラックアウトより短そうです。(ローリングシャッターの時間ではないか?像面位相差センサーは独立に読み出しか?)
測距の予測制御の(まさに)アルゴリズム(数式モデル)も性能に関係するので、製品としてはどちらが追従性がいいかはまた別の問題ですが、オリンパスはEシステムではそんなに動体追従性は高くなかったと思うのでアルゴリズムの改善の伸びしろはオリンパスのほうがありそうです。
ボケの話では、ピントが外れている時の輪郭の形状の制御の話がされました。
小型軽量性では、かばんの中の様子を見せて直感的に訴えていました。強力な手ブレ補正を活かして「万が一に備えて三脚を持つ」ことをしないで済む分さらに余裕ができています。





トークの後に下に降りてビルの前でユニサイクルパフォーマーの栗原舞さんの一輪車のパフォーマンスを小城先生が連写してその場で結果をみるというデモンストレーションが行われました。


0 件のコメント:
コメントを投稿